aidens-portfolio
Ball Tracking Robot
This project leverages computer vision to detect and track a ball using a camera and two motors connected to a Raspberry Pi.
| Engineer | School | Area of Interest | Grade |
|---|---|---|---|
| Aiden L | Palo Alto High School | Electrical Engineering | Incoming Sophomore |

Third Milestone
My third milestone aims to combine motors (milestone 1) and computer vision (milestone 2) to make the robot cleanly follow the ball. (don’t watch the video, it is no good at all…)
Initially, I took a photo every loop while the code was running and had the robot move forward, turn left, or turn right at full power (with RPi.GPIO) based on which side of the robot the ball was on. However, this led to some very janky movement, as full speed leads to overshooting. For finer control, I needed to adjust the speed of the motors.
This can be done through the enable pins (ENA/ENB) of the L298N motor driver, which support PWM (pulse width modulation), where power is rapidly toggled on and off to control the average speed of the motor, as opposed to modifying the voltage with a potentiometer (like making an analog output with a digital signal). As it turns out, the Pi has specific hardware PWM pins that allow PWM to run independently in the background as opposed to continuously toggling power on and off with software. To adjust PWM in code, I used the pigpio library.
With more precise speed control, we continuously take pictures and calculate the horizontal distance of the ball from the center, called “error”. We have a base speed for both motors, and calculate a “correction” proportional to the error. By adding the correction to the left motor and subtracting the correction to the right motor, the robot moves smoothly towards the ball based on how far off center the ball is. (todo diagram)
If the ball is not in frame, the robot spins around, searching for a ball. However, the robot spins quickly, meaning the ball only appears for 7-8 frames– by the time the robot pauses, the ball is out of frame again (because of inertia, probably). One solution was to make the robot spin far slower, but I wanted to optimize the speed of the robot; this was my biggest challenge throughout this entire milestone.
To solve this, I use a flag to track whether the robot is in search mode, which activates when the ball is out of frame. In search mode, the robot spins in the last known direction of the ball (e.g. right). So as it overshoots and misses the ball, it has briefly seen the ball on the other side of the frame (e.g. on the left), and updates the last known direction and spins towards it (e.g. left). But because of motor acceleration “lag”, the robot turns slower, and the ball comes back in view for long enough for the robot to lock on to the robot.
This “overshoot-then-reverse” motion is actually quite effective, and tracking the direction of the ball kills two birds with one stone as the robot gets a smart default direction to spin when, for example, the ball is kicked out of frame. (todo diagram)
Second Milestone
My second milestone deals with computer vision. Here, I set up a live camera feed with picamera2 and used cv2 to find the center of the ball and approximate its radius.

The main part of the code includes:
1) Image Capture: Capturing a photo with Picamera2.capture_array() and converting its RGB data to HSV with cv2.cvtColor();
2) HSV Thresholds: Creating two HSV thresholds (upper and lower bounds) with cv2.inRange() and combining them with a bitwise OR (we use two thresholds because red wraps around hue in HSV from 1-10 and 170-180); this should result in a binary (black + white) mask with white pixels representing red pixels in the image;
3) Noise Filtering: Average and erosion filters with cv2.blur() and cv2.erode() to filter out noise; at the end of this step, we should be left with all white pixels in the image representing the ball;
4) Ball Detection: Finding contours (outlines made out of white pixels from the binary mask) with cv2.findContours(), and fetching the ball (contour with the largest area) using cv2.contourArea();
5) Visualization: Calculating the smallest circle that can surround the ball contour with cv2.minEnclosingCircle() and drawing the contour, circle, and its center with cv2.circle() and cv2.drawContours().
Two helper utilities were added to speed up testing:
- Live HSV Inspector: fetches the HSV of any pixel that I hover over
- Real-time Mask Adjustment: modify the HSV thresholds in real time by pressing keys to avoid rerunning code.
First Milestone
My first milestone aims to assemble the main components of the ball tracking robot, which includes:
- Chassis: as the base of the car.
- L298N Motor Driver: uses two H-bridges to allow changes in speed and direction for two motors.
- Raspberry Pi: a mini computer to bring all the components together on a high level, processing images and steering the robot.
- Pi Camera: a small camera to use for object detection
- Breadboard: to connect components without soldering, right now only used to ground the Pi and battery pack together.
- Battery Pack: to power the motors.
<img src=”docs/assets/milestone1.png width=”720” height=”1280”>
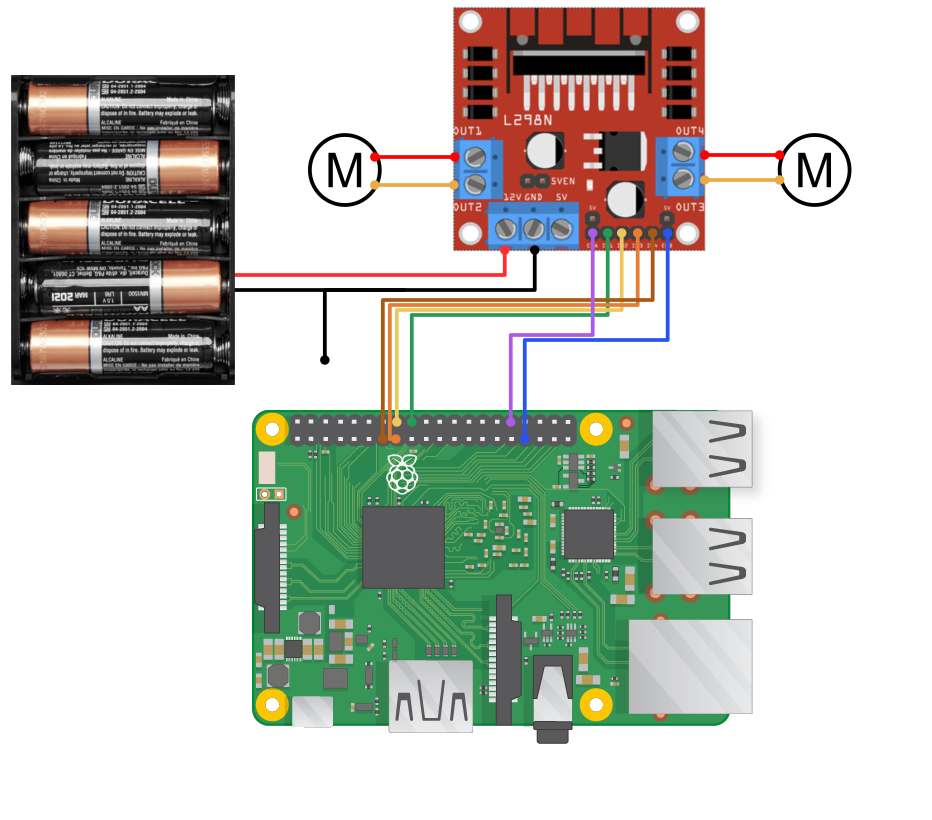
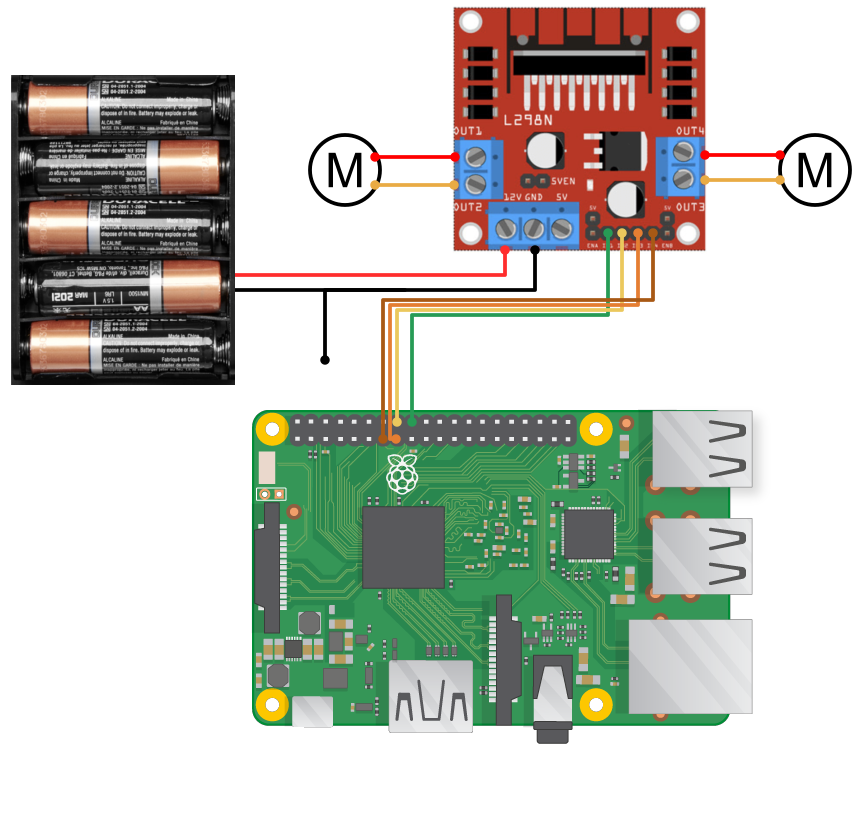
The wiring is quite simple; the Raspberry Pi and the battery pack are grounded together on the breadboard, then connected into the GND input of the L298N motor driver. Four GPIO pins from the Pi are connected to the IN1-IN4 ports of the L298N. The battery pack’s positive lead is connected to the 12V input of the driver. Finally, the four output pins of the motor driver are wired to two motors attached to the wheels.
Additionally, I tested the camera with libcamera-vid -t 0 and a VNC connection to view the preview, and tested the motors with a simple script.
But although relatively simple, this milestone took six days to complete. This was primarily due to numerous mistakes with soldering wires to components (ex. motors, power button), causing the wires to fall off or snap, as well as problems with the Raspberry Pi (had to replace it and the SD card) and a defect in my L298N missing its regulator jumper, making it unable to power on with my two inputs (12V and GND). Luckily there is not much hardware integration in the future milestones, so it should (hopefully) be “smoother” sailing from here.
I plan to start implementing object detection and the provided ultrasonic sensors to identify and track the ball next.
Starter Project
For my starter project I soldered an RGB slider together, which involved three sliders, an LED light, and a USB-C connector soldered to a PCB. The sliders act as potentiometers, or variable resistors, and can increase or decrease the current (by adjusting resistance) through each LED channel (red, green, and blue). By blending the current for red, green, and blue inside the LED, we can mix colors.
 |
|---|
| Blending red and blue to make purple |
Schematics
 |
|---|
| Schematic for milestone 3 (added enable pins) |
 |
|---|
| Schematic for milestone 1 |
Code
motors.py:
import pigpio
class Motor:
def __init__(self, pi, in1, in2, pwm, percent=100):
self.pi = pi
self.in1 = in1
self.in2 = in2
self.pwm = pwm
self.percent = percent
self.pi.set_mode(self.in1, pigpio.OUTPUT)
self.pi.set_mode(self.in2, pigpio.OUTPUT)
self.pi.set_mode(self.pwm, pigpio.OUTPUT)
def normalize(self, speed):
speed = max(0, min(speed, 1)) # Ensure speed is between 0 and 1
return int(speed * 255)
def output_pwm(self, speed):
speed = self.normalize(speed) * self.percent / 100
self.pi.set_PWM_dutycycle(self.pwm, speed)
def forward(self, speed): # Speed 0-1
self.pi.write(self.in1, 1)
self.pi.write(self.in2, 0)
self.output_pwm(speed)
def backward(self, speed):
self.pi.write(self.in1, 0)
self.pi.write(self.in2, 1)
self.output_pwm(speed)
def stop(self):
self.pi.write(self.in1, 0)
self.pi.write(self.in2, 0)
Notes
- PWM (pulse width modulation) controls the speed by rapidly toggling power on and off. The length of the “on” pulses control the amount of power delivered, as opposed to changing the voltage output from the pin.
- The
pigpiolibrary is already preinstalled with the RPi OS. It supports “hardware PWM” where specific GPIO pins have dedicated timers for toggling power, as opposed to “software PWM” which relies on software to toggle power (which is apparently less accurate?) - Always run
sudo pigpiodon RPi startup to start thepigpiodaemon (don’t have to do so every time).
cv.py:
import cv2
import numpy as np
# HSV "wraps around" red so we need two masks
mask1_low = np.array([0, 206, 0]) # for small ball, remove this mask for big ball
mask1_high = np.array([10, 255, 255])
mask2_low = np.array([170, 206, 30]) # [170, 108, 30] for big ball
mask2_high = np.array([180, 255, 255]) # [180, 240, 255] for big ball
def find_ball(frame):
frame_hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Masks over HSV frame
mask1 = cv2.inRange(frame_hsv, mask1_low, mask1_high)
mask2 = cv2.inRange(frame_hsv, mask2_low, mask2_high)
mask = mask1 | mask2
# Erode (white noise) away
kernel = np.ones((8, 8), np.uint8)
mask = cv2.blur(mask, (8, 8))
clean_mask = cv2.erode(mask, kernel, iterations=2)
# Find contours, use biggest contour and draw enclosing circle as the ball
contours, hierarchy = cv2.findContours(clean_mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
if contours:
ball = max(contours, key=cv2.contourArea)
if cv2.contourArea(ball) > 200:
cv2.drawContours(frame, [ball], -1, (0, 255, 0), 3)
(x, y), radius = cv2.minEnclosingCircle(ball)
center = (int(x), int(y))
radius = int(radius)
return (center), radius
return None
Notes
- The main method here is
find_ball, which takes in an array of pixels from (frame) and returns the center (coordinates) and radius (integer) of the ball. - I use two HSV thresholds (masks):
mask_1for red-orange hues, andmask2for red-pink hues. - Blur filter, erosion, and contours (look it up)
- Get center based on the center of the smallest surrounding circle of the largest contour (which should be of the ball).
main.py:
from picamera2 import Picamera2
import cv2
import pigpio
import time
from cv import find_ball
from motors import *
# ------ CAMERA SETUP ------
picam2 = Picamera2()
print(picam2.sensor_modes)
config = picam2.create_video_configuration(main={"size": (640, 480), "format": "RGB888"})
picam2.configure(config)
picam2.start()
cv2.namedWindow("Robot View")
# ------ MOTOR SETUP ------
pi = pigpio.pi()
IN1 = 24
IN2 = 23
IN3 = 22
IN4 = 27
ENA = 12
ENB = 13
LEFT = Motor(pi, IN1, IN2, ENA)
RIGHT = Motor(pi, IN3, IN4, ENB, percent=75)
def cleanup():
LEFT.stop()
RIGHT.stop()
pi.stop()
# ------ CONTROL PARAMETERS ------
KP = 0.001 # Proportional gain
BASE_SPEED = 0.75
# ------ MAIN LOOP ------
try:
searching = False
search_dir = "right"
while True:
frame = picam2.capture_array()
result = find_ball(frame)
# ------ IMAGE PROCESSING ------
if result:
center, radius = result
x, y = center
# ------ DRAWING ------
cv2.circle(frame, center, 4, (255, 0, 0), -1) # center
cv2.circle(frame, center, radius, (255, 0, 0), 2) # ball
cv2.rectangle(frame, (center[0] - 20, center[1] - 5), (center[0] + 70, center[1] + 25), (255, 0, 0), -1)
cv2.putText(frame, f"x={center[0]}", (center[0], center[1] + 20), cv2.FONT_HERSHEY_COMPLEX_SMALL, 1, (255, 255, 255))
# ------ CONTROL LOGIC ------
error = x - 320
correction = KP * error # (+) -> right, (-) -> left
left_speed = BASE_SPEED + correction
right_speed = BASE_SPEED - correction
print(f"RADIUS {radius} LEFT {left_speed} RIGHT {right_speed}")
LEFT.forward(left_speed)
RIGHT.forward(right_speed)
if x <= 175: # Left
cv2.arrowedLine(frame, (100, 450), (20, 450), (0, 255, 0), 3)
search_dir = "left"
elif x >= 465: # Right
cv2.arrowedLine(frame, (540, 450), (620, 450), (0, 255, 0), 3)
search_dir = "right"
else:
if radius > 200: # Ball found
print("FOUND")
cv2.putText(frame, "Ball found", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
LEFT.stop()
RIGHT.stop()
elif radius > 150:
print("FINAL APPROACH")
cv2.putText(frame, "Final approach", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
LEFT.forward(1); # Jumpstart the robot movement
LEFT.forward(1);
time.sleep(0.01);
LEFT.forward(0.35)
RIGHT.forward(0.35)
# ------ SEARCHING ------
else:
print("SEARCHING")
cv2.putText(frame, "No ball detected", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
if search_dir == "right":
LEFT.forward(0.45)
RIGHT.stop()
else:
LEFT.stop()
RIGHT.forward(0.45)
searching = True
# ------ DISPLAY ------
cv2.imshow("Robot View", frame)
key = cv2.waitKey(1) & 0xFF
if key and (key == 27 or key == ord('q')): # ESC or q
break
# ------ CLEANUP & EXIT ------
finally:
cleanup()
cv2.destroyAllWindows()
picam2.stop()
print("Camera stopped, windows destroyed")
Notes
The code is broken into sections:
- Camera Setup: Use
Picamera2to set up a camera (using RGB format). - Motor Setup: Set up motors using the
Motorclass frommotors.py. - Control Parameters: Implement parametes for proportional control (adjust steering based on how far left/right the ball is) to smooth out robot movement, as opposed to steering only left or right.
KP(the proportional gain) adjusts how aggressively we steer,BASE_SPEEDadjusts our forward movement speed. - Main Loop: The code in the main loop keeps running until we press “q” or ESC.
- Image Processing: Captures an image and finds the location of the ball with the
find_ball()method fromcv.py.- Drawing: Draws the estimated ball position onto a frame overlaying the picture with
cv2.namedWindow. - Control Logic: Calculates
errorof the ball, or horizontal distance from the center, which is positive when the ball is to the right and negative when the ball is to the left, and calculates acorrectionbased onKPanderror. Thiscorrectionis added to the left motor and subtracted from the right motor such that the left motor has a higher power (turns right) when the ball is on the right, and vice versa (see milestone 3 text). If the ball leaves the frame, the robot tracks which direction it went (left or right).
- Drawing: Draws the estimated ball position onto a frame overlaying the picture with
- Searching: If no ball is detected, the robot moves in the last known direction of the ball.
- Display: Shows the edited frame in the OpenCV window.
- Image Processing: Captures an image and finds the location of the ball with the
- Cleanup & Exit: ALWAYS runs at the end of execution because of the
finallyclause. Stops the motors, camera, and window.
Bill of Materials
| Part | Note | Price | Link |
|---|---|---|---|
| CanaKit Raspberry Pi 4 4GB Starter Kit | Kit with an Raspberry Pi, 32GB SD card, case, and power switch | $119.99 | Link |
| Raspberry Pi Camera Module | The camera used to take pictures for object detection | $14.99 | Link |
| L298N Motor Driver | H-Bridge motor board that drives two motors | $7.99 | Link |
| Robot Car Chassis Kit | Chassis of the robot | $13.99 | Link |
| Breadboard | To ground components together | $8.59 | Link |
| Jumper Wires | To connect the Raspberry Pi, L298N, and breadboard | $6.98 | Link |
| INIU 10000mAh Portable Charger | Portable power bank to put on the robot | $21.99 | Link |
| Wireless Mouse & Keyboard | To operate the Raspberry Pi on setup | $22.99 | Link |
| HDMI Video Capture Card | To display RPi contents onto laptop | $9.98 | Link |
| Soldering Kit | For soldering | $14.99 | Link |